XK-1移植版の倒立振子について
倒立振子本体は北斗電子様のPUPPYです。
XMOS社のXK-1にA/Dコンバータを接続して制御ソフトウェアを移植しました。
ただ、基板変更に伴い物理定数が変わるため、Scilabによるシミュレーションでフィードバックゲインを再計算しています。
車輪速度指令値=1.5[rad/s]を与えた時に累積誤差が漸近安定する様子を示します。
(クリックで拡大)
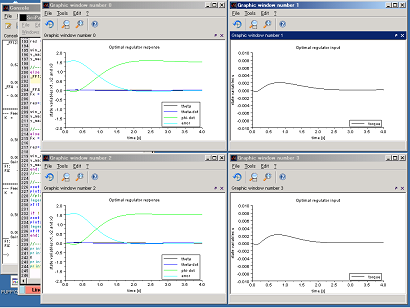
フィードバックゲイン再計算により、ほとんど同じ動きをする事がシミュレーションで確認できました。
※左上グラフ:PUPPY付属ソフトウェアによる状態変化(車体角、車体角速度、車輪角速度、累積誤差)
右上グラフ:PUPPY付属ソフトウェアによるトルク入力値
左下グラフ:XMOSへの移植版ソフトウェアによる状態変化(車体角、車体角速度、車輪角速度、累積誤差)
右下グラフ:XMOSへの移植版ソフトウェアによるトルク入力値
姿勢制御のフィードバック周期を 1/10 にしてみましたが、へっちゃらでした。
400MHzで動作しているので、性能が有り余っているみたいです…
2軸タイプ
2軸タイプはソースが付属していないので、ちょっと苦労しました。
実機デバッグでは、内部の変数の値をシリアル出力していますが、XC-3付属のXTAGを使用しています。
0:09 での、PC画面の下側は、921600bpsのUARTで出力した内部変数をターミナルソフトで受信・表示している様子です。
性能解析を行ったところ、処理負荷にはまだ余裕がありました。
1軸と2軸で使用している基板は全く同じものです。
普通のマイコンですと、周辺I/O機能の制約に縛られて基板配線に手間取る場合がありますが、
XMOS社デバイスは周辺I/O機能自体をソフトウェアプログラミング出来るので、基板設計が楽になります。
XMOS社デバイスを用いて、低コストかつ高速な制御モデルの実装を実現できます。
出展したデモの設計資料や解析内容については、
弊社セミナープログラム
にてご案内いたしております。
他のデモサンプルや、性能解析結果については、お問い合わせよりご連絡下さいませ。
XMOS社 SDS について
XMOS社 SDS とは?
XMOS社 SDSとは、ファルクウェアの「混ぜる」コンセプトを実現する
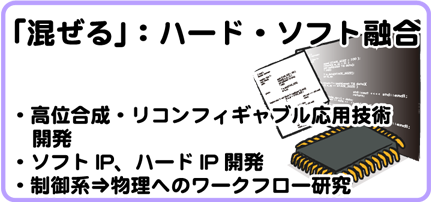 イベントドリブンプロセッサ(EDP)
イベントドリブンプロセッサ(EDP)
です。
これは、ハードウェアをソフトウェアで表現する事で、
ソフトウェアIP + イベントドリブンプロセッサ
を利用して、低コスト・短納期・多品種に対応したシステムが構築可能となります。
このアーキテクチャにより、必要なソフトウェアIPを選択してコストダウンを実現します。
ちょっとした信号処理をしたいけれどFPGAやDSPは大げさになってしまう、
少量多品種、短納期、低コストをすべて満足させる事が厳しい
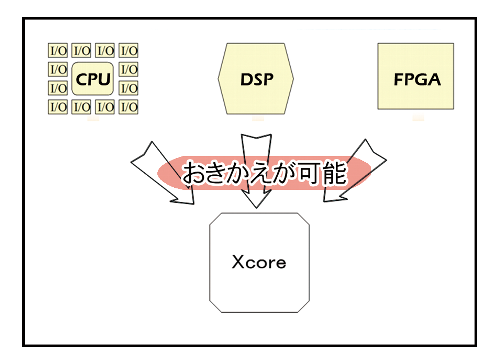
などの解決手段として、ハードウェア機能もソフトウェアでプログラミングできるXMOS社の
アーキテクチャをご提案します。
特に、これからの時代汎用品は海外で安く製造できてしまう為、利益率を高くする為には
ユーザの細かいニーズにこたえる必要が出てきます。
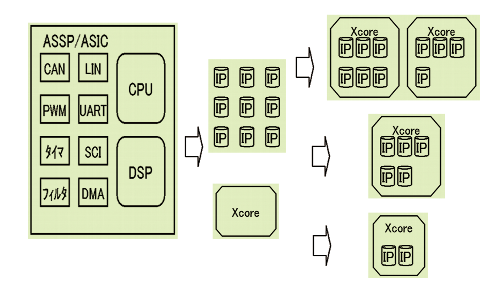
少量多品種でも部品点数を減らして製品コスト削減を進める為に
多品種小ロットのASIC
をお勧めします。
弊社は、XMOS社 SDS製品の導入から多品種小ロットASIC開発までの
フルサポートをおこなっております。
多品種小ロット製品のコストダウンにお悩みでしたら、是非解決させて下さいませ。
各種セミナーのご案内
弊社では、XMOS社Xcore の使い方の実例を公開するセミナーを開催しております。
ご案内しているセミナーは下記です
| No. | テーマ | 題材 |
|---|---|---|
| 1 | マルチスレッド・マルチコアプログラミング | FFTライブラリの並列化設計により、安全なマルチスレッド・マルチコア対応プログラミング手法を習得します |
| 2 | モデルベース開発 | 倒立振子のシミュレーション(Scilab)からXcoreへの実装を通じて、モデルベース開発への活用方法を習得します |
お問い合わせ
お問い合わせは
ファルクウェア株式会社 XMOS担当までお願い致します -
メール

電話
052-878-1297